
Frequently Asked Questions
Schnittstellen
Benutzerspezifische Datenformate können ergänzt werden. Wenn Ihre Schnittstelle nicht aufgeführt ist, kontaktieren Sie uns bitte.
Weiters bestehen Schnittstellen zu Microsoft Office (WinWord® und Excel®), Google Earth® und der FEMFAT-Software.
- RPC®
- Remus®
- Diadem®
- Diadem® - TDM
- Famos®
- nCode
- ASCII
- MSC Adams®
- Simpack®
- Motionsolve®
- Recurdyn®
- VI-Grade®
Allgemein
Das MKS-Modell muss lauffähig sein und einfache Funktionstests wie das gleichzeitige/wechselnde Einfedern der Achsen im Gesamtfahrzeugmodell ermöglichen.
Es ist sehr wichtig, die Messpunkte im Modell mit den Messungen bezüglich Position, Einheit und Richtung mit Vorzeichen zu trimmen.
Während des VI-Prozesses (Virtuelle Iteration) können Ungenauigkeiten im Modell mit weniger Aufwand identifiziert und korrigiert werden, da das Verhalten bezüglich Messdaten leichter analysiert werden kann.
Wenn das MKS-Modell zu ungenau erscheint, kann FEMFAT LAB model improvement eingesetzt werden, um die Modellgenauigkeit zu erhöhen, siehe folgende Übersicht
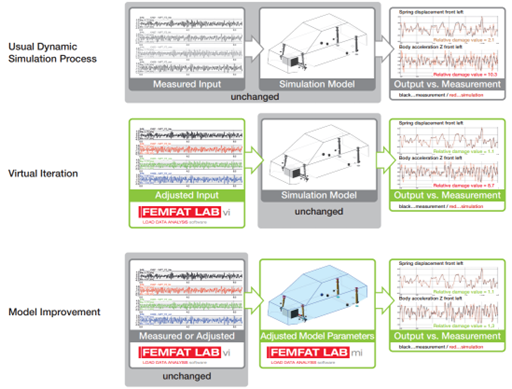
Die Übertragungsfunktion besteht aus vielen Matrizen, wobei für jeden Frequenzschritt eine Matrix verwendet wird. Die Qualität der Übertragungsfunktion hängt von der Simulation des Rauschsignals ab, daher spiegeln sich alle Merkmale des erstellten Rauschens in der Übertragungsfunktion wider. Im Allgemeinen können Nichtlinearitäten mit einer solchen Übertragungsfunktion behandelt werden, mit Ausnahme von sehr hohen (z. B. sehr steifen Anschlägen), hier müssen kleine Verstärkungsfaktoren verwendet werden, was die Konvergenz der Iteration verlangsamt. Manchmal ist zusätzlich eine manuelle Bearbeitung der Signale erforderlich.
Diese hohen Nichtlinearitäten sollten in der Übertragungsfunktion bzw. in der Simulation des Rauschsignals nicht berücksichtigt werden, da sonst das komplette Zeitsignal (das zum größten Teil diese hohen Nichtlinearitäten nicht beinhaltet) beeinflusst wird.
Es kann jedes beliebige Reifenmodell verwendet werden, aber möglicherweise mit Genauigkeitseinbußen! Für eine genaue Berechnung der 3D-Straße sollten auch die Längs- und Querrichtung durch z.B. gemessene Messradkräfte berücksichtigt werden und das Reifenmodell sollte daher diese Richtungen beherrschen.
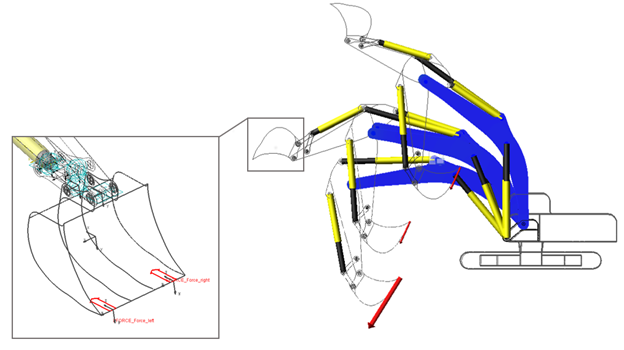
Die Schaufelkräfte können zum Beispiel basierend auf gemessenen Dehnungen und Zylinderwege für Betriebszyklen berechnet werden.
Die folgenden Möglichkeiten können ohne Änderung des MKS-Modells im Rahmen des vi-Prozesses ausprobiert werden:
- Manuelles Bearbeiten der Eingangskanäle durch
- Skalieren
- Filtern
- Verwenden einer anderen Übertragungsfunktion
- Filtern eines oder mehrerer Eingangs- oder Antwortkanäle
- Ändern der Verstärkungsfaktoren der Eingangs- oder Antwortkanäle
- Bearbeiten der Zielkanäle (Messdaten) zur Erstellung der neuen Eingangssignale, für den Vergleich der Ergebnisse aber die ursprünglichen Zielsignale verwenden
Unterstützte Modellparameter, die automatisch verbessert werden können:
- Masse, Schwerpunkt Massenträgheitsmoment
- IX oder IY oder IZ
- Gemeinsamer Faktor für IX, IY und IZ
- SFORCE
- Steifigkeit definiert durch Wert oder Spline (nichtlinear möglich), translatorisch (z.B. Schraubenfeder) oder rotatorisch (z.B. Stabilisatorsteifigkeit)
- Dämpfung definiert durch Wert oder Spline (nichtlinear möglich), translatorisch oder rotatorisch
- VFORCE, GFORCE, FIELD (Buchse)
- Steifigkeit definiert durch Wert oder Spline (nichtlinear möglich), gemeinsamer Faktor für alle Richtungen oder getrennte Richtungen
- Dämpfung definiert durch Wert, gemeinsamer Faktor für alle Richtungen oder getrennte Richtungen
- BEAM
- Flächenträgheitsmoment
- E- und G-Modul
- Gruppe von Elementen (z. B. Blattfeder)
- Freigang von Druck- und Zuganschlag
Die 3D-Straßeniteration ist auch in der Lage, die 3D-Straße für spezielle Anwendungen zu erzeugen, bei denen ein Scan nicht möglich ist.


Sie haben nicht gefunden, was Sie gesucht haben und haben noch Fragen?